This circuit allows the robot to respond to two IR reflective sensors at the same time, allowing it to avoid obstacles on either the left or right sides, or (once the motor leads are switched) to track a black line as provided in the kit.
Red LEDs have been added to help you debug sensor placement. With the motor switch in the OFF position, watch the red LEDs and move the robot from left to right across the provided black line, if everything is working properly the light should go on and off completely as the black line is passed.
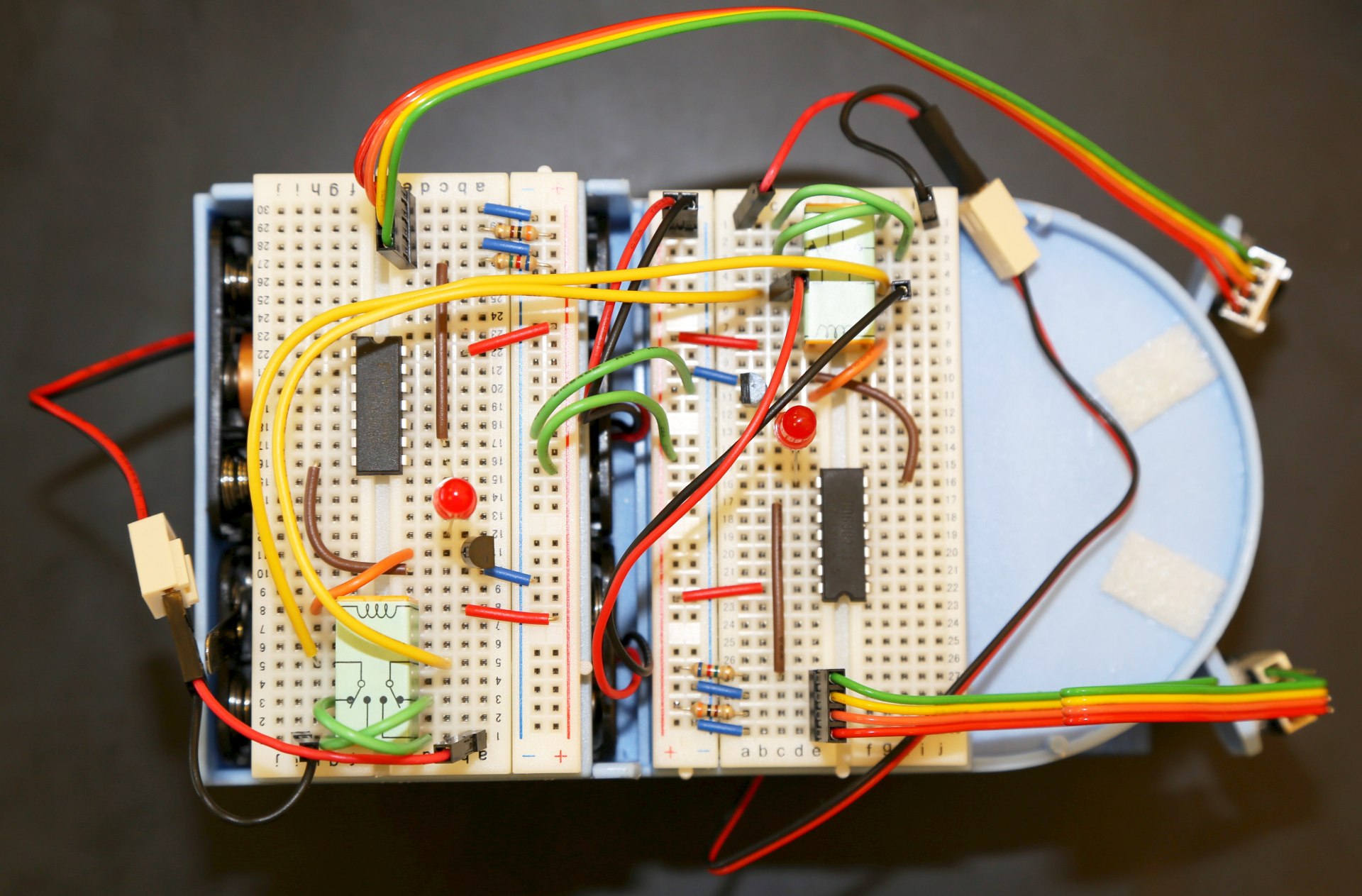
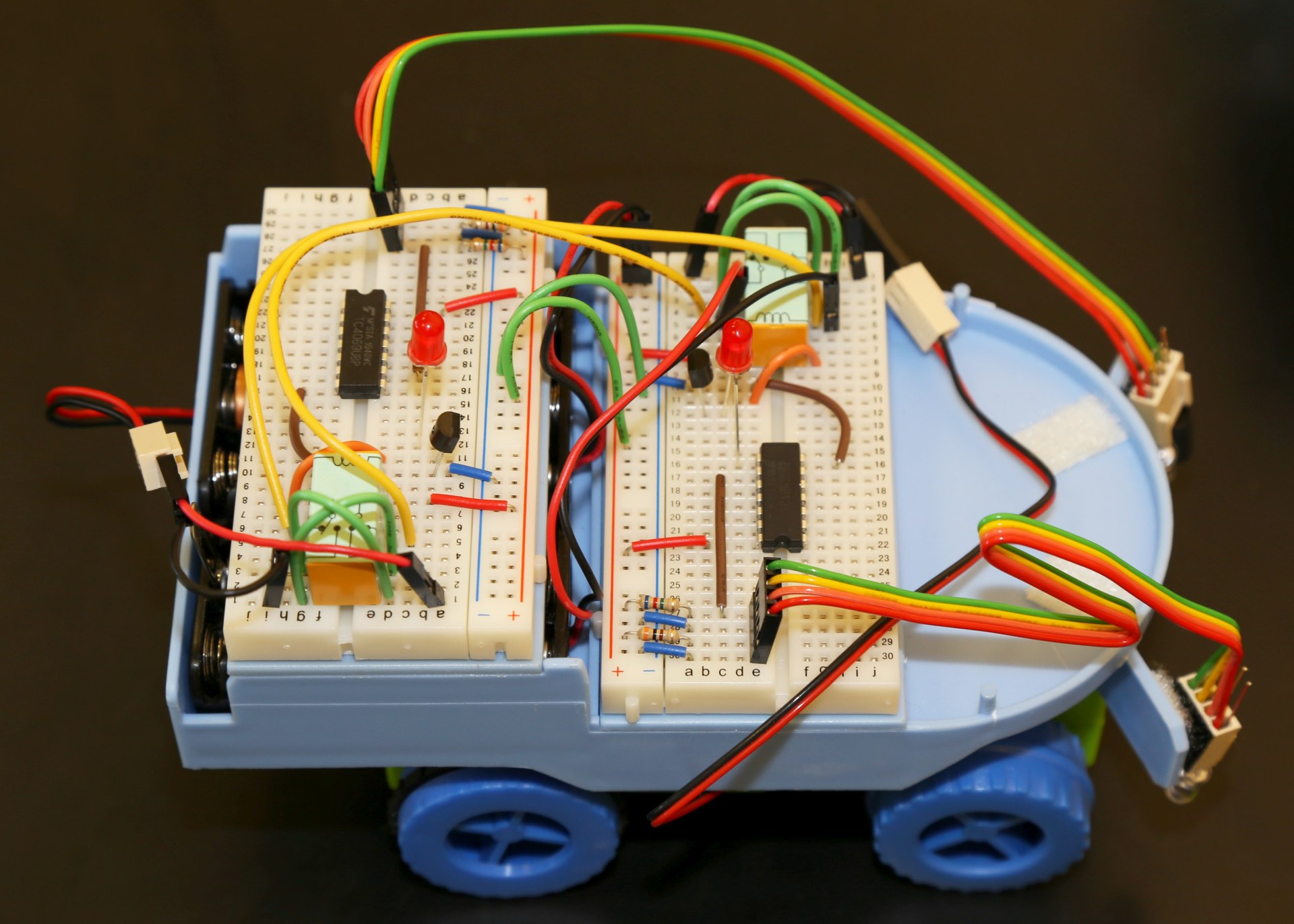
Note: The two breadboards shown below are identical, the front one goes to the right motor, the back one to the left motor. If you cannot see how a component is placed on one breadboard, just check the other one as they are the same.
If the IR reflective sensors are not working correctly here are some things to try:
Bend the clear IR emitter so that it faces perfectly forward.
Move the sensors closer or futher from the ground – it is possible to go too close! about 3/4″ (19mm) is a good distance from the ground table surface.